A hőmérő kapott egy kis Windows-os programot, lentebb letölthető.
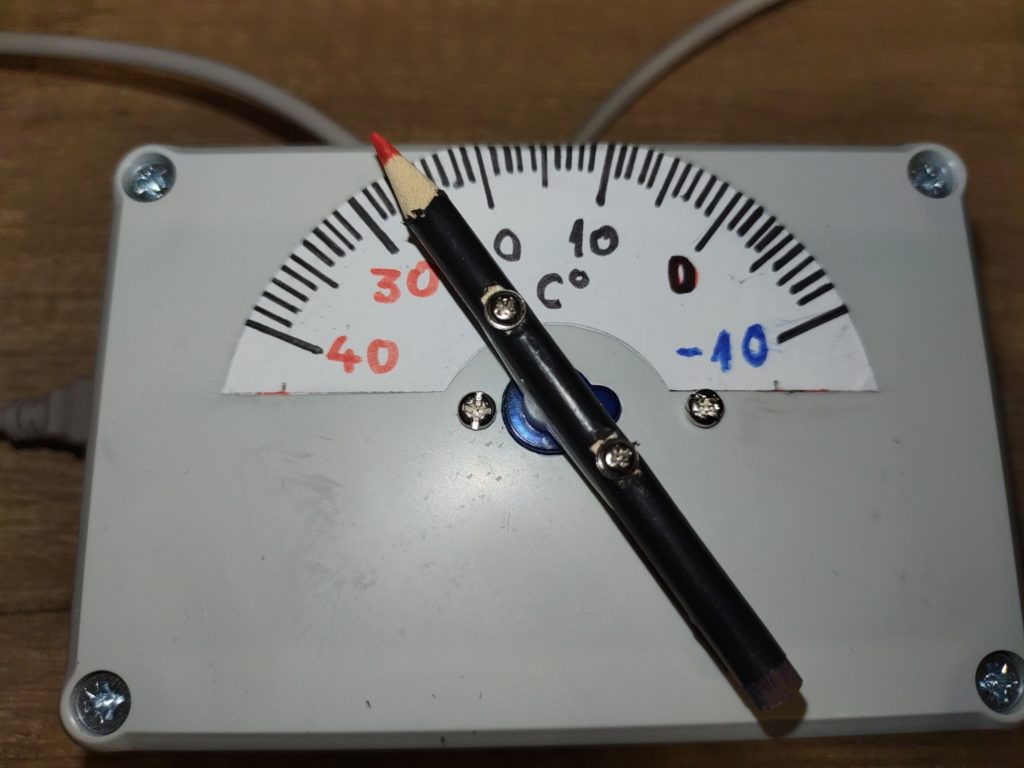
Szerettem volna egy analóg kinézetű hőmérőt készíteni, a lehető legegyszerűbb módon. Egyúttal bemutatom a termisztor (hőre változó ellenállás) használatát Arduinoval. Egy miniatűr olcsó szervomotor mutatja az értékeket a skálán. A most bemutatott amolyan prototípus, idővel készül egy másik félméteres vagy nagyobb skála mérettel. (sokkal komolyabb motorral)
Mivel a legolvasottabb bejegyzés az oldalon a feszültségmérő készítése, remélem ez is olyan népszerű lesz.