Mikrokontroller vezérelt digitális órák pontatlanságával foglalkozom ebben a bejegyzésben. Lelőttem a klikkvadász címet az első sorban… 😀
A lényeg, hogy anno domini, építettem egy digitális órát jó nagy LED-es kijelzővel, mert szemüveg nélkül nem látom a sötétben a kicsi kijelzőket rövidlátó vagyok. (nem, nem szódásüveg :D) Ez az óra nem naptár IC-ből olvasgatja ki az időt, hanem maga a mikrokontroller számolja az időt. Ez mind szép és jó, de fiatal és bohó lévén elhanyagoltam azt a tényt, hogy ciklus lefutási idők vannak egy mikrokontroller működése közben, pl. idő telik el amíg frissíti a kijelzőt. A hibát tetéztem azzal hogy delay-eket használtam, nem az elindulástól eltelt időt. (akkor is késne 😀 csak nem ennyit)
Ez elenyészőnek tűnik de egy óra esetében nagyon fontos, mert idő elteltével ezek a parányi idő szeletek összeadódnak és az óránk bizony késni kezd, oly annyira, hogy kompenzálnom kellett 6 óránként fél percet kell hozzáadnom az időhöz így viszonylag pontos, havonta egyszer kell beállítani.
Na most mi van ha teszünk bele egy ébresztő funkciót, mondjuk játszon le néhány akkordot egy számból. Amíg visít a pécészpíkerből a Finale Countdown (remélem érzitek az iróniát) idő telik el, és ezt is lehet kompenzálni. (ha naptár IC-vel csináltam volna akkor,a naptár IC közben szépen gyalogolna előre)
Következtetés -képpen, delay-eket el lehet felejteni, használjunk naptár modult (ez sem pontos), és érdemes szinkronizáltatni az órát időközönként. Ehhez lehet használni egy wifi modult, vagy óra impulzus modult, vagy egy GPS modult. GPS esetében érdekes módon 1 műhold mindig fogható még házon belül is, koordináta számítást nem tud végezni a modul de a pontos idő az jön belőle.
Itt nem fogom részletezni ezeknek a moduloknak a beépítését, leprogramozását, csak az egykori kvázi hibás programomat teszem közzé másoknak okulásul.
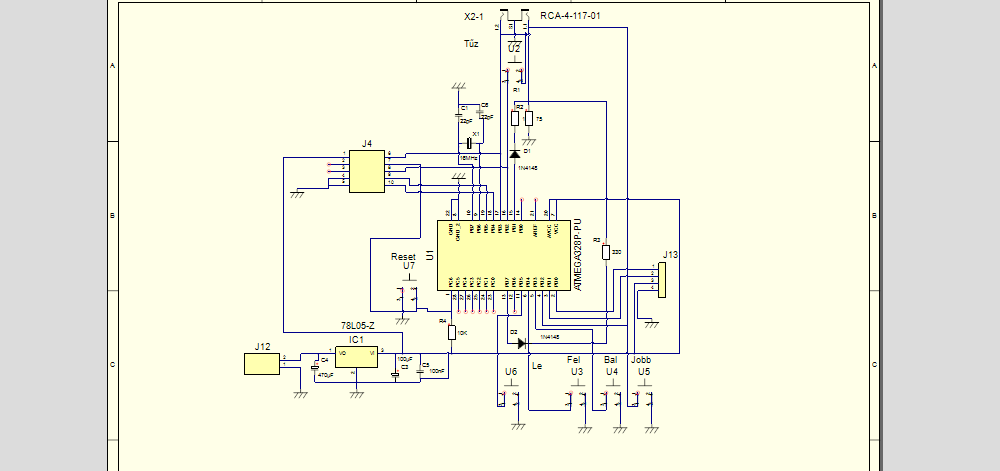
Az áramkört is csak linkelem (ezt nem én csináltam de a felépítés azonos) mivel azok a kijelzők már nem kaphatóak és szemétre szánt játékgépből mentettem ki őket. De elég szép példája annak hogy shift-regiszterekkel hogyan lehet bármennyi kimeneted.

Tehát van egy buszunk amire fel van fűzve az összes shift-regiszter, így csak 3 kimenetet használunk a mikrokontrollerből. Ahány hétszegmens kijelző annyi regiszter. Az ULN 2803 tranzisztor mező azért kell mert ennek a kijelzőnek egy szegmense 6 sorba kötött LED-ből áll. Az én áramkörömben 12V -ról üzemel. A mikrokontroller TTL szintekkel dolgozik tehát 5V és nem tud akkora teljesítményt illeszteni kell. Ilyen módon felfűzött regiszterekkel annyi kimeneted lehet amennyit meg tudsz címezni adott mikrokontrollerrel. Nem sebesség igényes dolgoknál megfelelő. Némi módosítással reléket is kapcsolgathatsz.
Program:
Itt letölthető.
Ez Bascom-ban íródott és elnézést kérek de nem vittem túlzásba a kommenteket. ATmega 8 a használt mikrokontroller a használt kimenetek a programból adódnak. (nem most készült :D)
A műszer: