Mint korábban írtam, ezek a modulok extra érzékenyek a stabil 3,3V-s tápra, nagyon nem szeretik a táp fluktuációját, és ilyenkor hajlandóak elfelejteni a programjuk egy részét vagy egészét. Ha megmarad bennük a bootloader, feléleszthetjük őket soros porton történő firmware feltöltéssel. Bootloader meglétét általában az bizonyítja, hogy a kék led villan 1-szer amint bekapcsoljuk a modult. (Ha nem villan a led, lehet próbálkozni flashrom égetéssel)
Program feltöltéshez kelleni fog a korábban publikálásra került áramkör, ugyanezzel az áramkörrel Arduinoval is tudunk feltölteni programokat a modulba:
Szükséges, az eredeti firmware ami letölthető itt:
Meg keressük a számítógépen hogy melyik soros portra installálódott az FT232 modulunk. Esetemben Com3. (Vezérlőpult ->Eszközkezelő ->Portok)
A programban alkalmazzuk a következő beállításokat:
Programban ráklikkelünk a START gombra.
Programozó áramkörünkön megnyomjuk a PGM gombot lenyomva tartjuk és megnyomjuk a RST gombot majd először az RST-t utánna a PGM-et felengedjük. (ezzel állítottuk a bootloadert program módba)
A firmware feltöltését a kék csík jelzi az ablak alján, és a program kiírja hogy végzett.
RST gomb megnyomása után egy PUTTY vagy egyéb terminál konzollal ellenőrizhetjük a működést.(előző cikkben leírtam)
Személyes kedvencem (anno egy már akkor is öreg árkád gépen nyomtam):
A tartalom nem elérhető. A sütik használatát az "Elfogadás" gombra kattintva lehet jóváhagyni.
És még egy:
A tartalom nem elérhető. A sütik használatát az "Elfogadás" gombra kattintva lehet jóváhagyni.
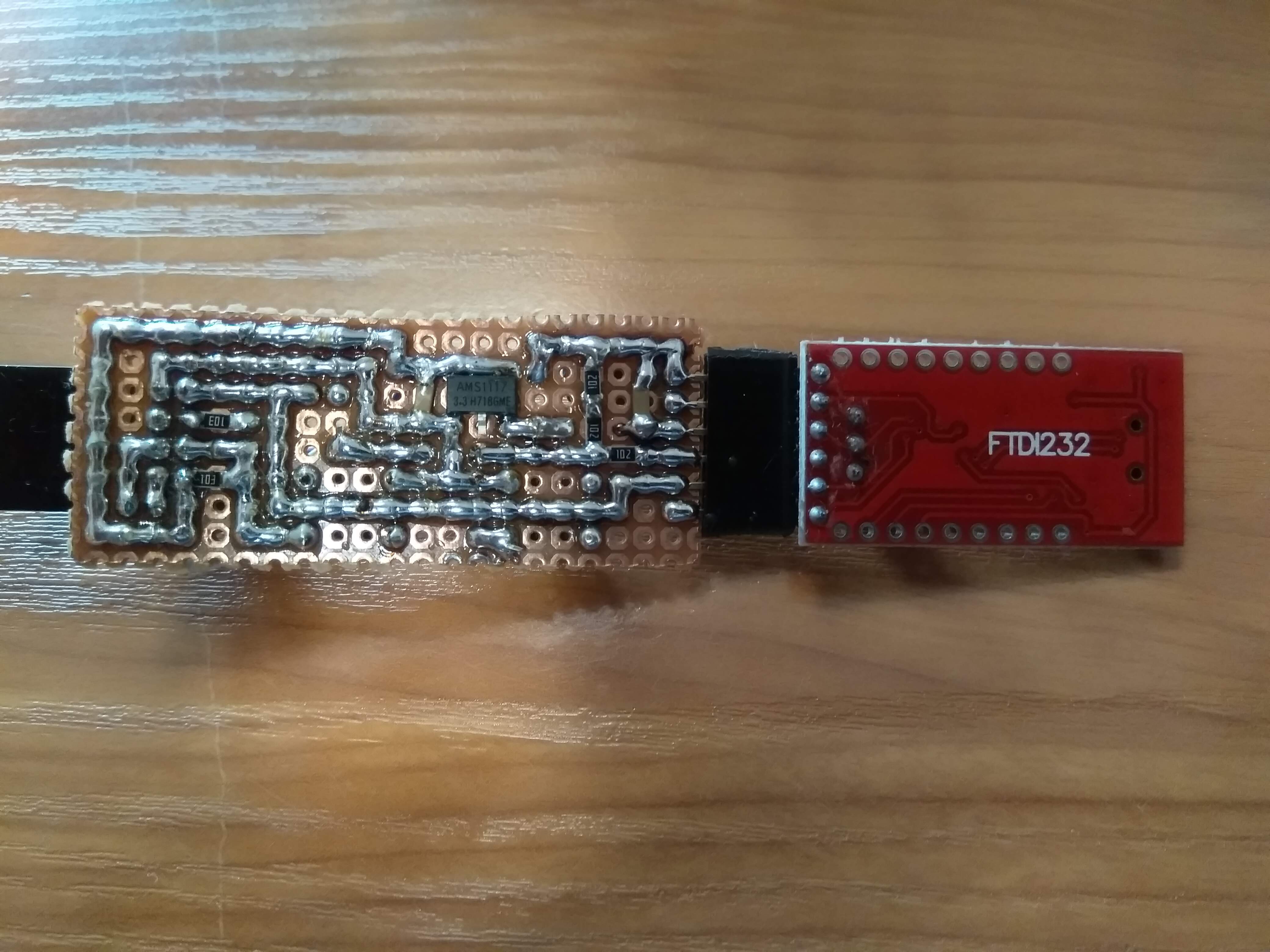
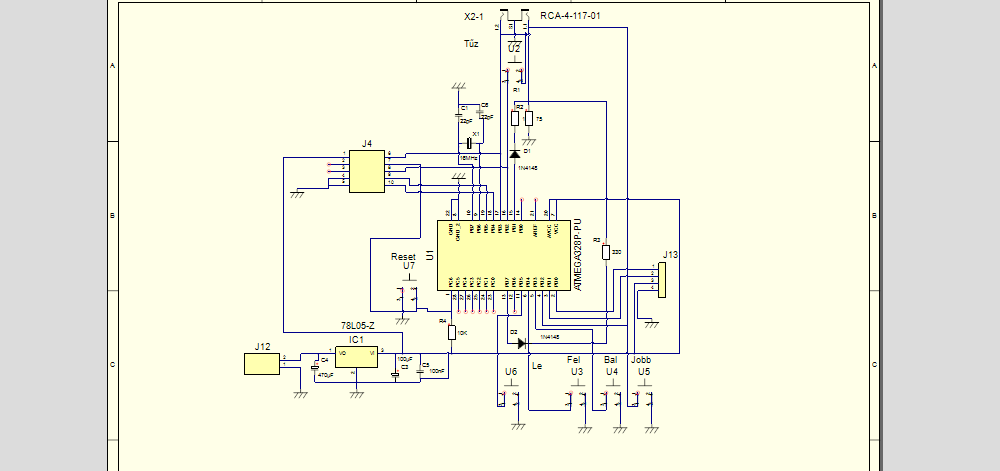
Természetesen rögtön tudtam hogy meg fogom építeni és így is tettem. Az én verzióm nem olyan szép mint a vásárolható kitt de egyoldalas nyákra készült, és így könnyebb megépíteni. Mellékelek kapcsolási rajzot nyákrajzot.
Későbbi elektronikus geoláda bejegyzésem, előfutáraként írom ezt a cikket, a láda programjának megértéséhez szükség van az ESP-01 modul AT-parancsainak ismeretére. A modul egy WIFI eszköz, soros kapcsolatot tesz lehetővé WIFI-n keresztül.
A modul tápfeszültsége 3,3V de ennek stabilnak kell lennie. Instabil tápfeszültség esetén hajlamos elfelejteni a programját.
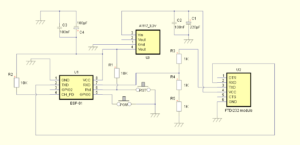
ESP-01
Kapcsolási rajz a teszteléshez, flasheléshez:
Több helyen láttam , hogy a modult összekötik egy FTDI232 usb-soros átalakító, modullal amelynek a kimenő 3,3V feszültségét használják fel az ESP-01 modul tápfeszültsége gyanánt, ami látszólag egy egyszerű, frappáns megoldás. Így elkerülhető, hogy illeszteni kelljen a 3,3V TTL szintű modult az 5V TTL szintű átalakítóhoz. (Az FTDI232 modul ilyenkor 3,3V TTL szinteket használ) A probléma az, hogy az FTDI232 3,3V-os kimenete nem bírja el a modul néha 300mA-is elérő áramfelvételét. És ott az instabil táp, a modul belepusztul. 😀
Ergo illeszteni kell az ESP-01-et az átalakítóhoz, az átalakító 5V kimenetére egy 3,3V stabilizátort kötni, vagy külső tápot használni.
A fenti áramkör alkalmas, új AT parancsos firmware beégetésre valamint Arduino-s használathoz.
AT parancsok:
Nem fogom tárgyalni az összeset csak a legfontosabbakat. Putty-al, Telnet-el vagy egyéb terminál programmal tesztelheted. Kocsi vissza új sort kell küldeni a parancsok után. Mindig nagybetűvel küldünk parancsot.
Beállítások a terminál programhoz:
Az ESP-01 kiszállításkor 115200 baud-ra van beállítva. (ez módosítható)
AT áramkör válasza OK arra szolgál, hogy a soros kapcsolatot teszteljük
AT+RST áramkör válasza OK reszeteli az áramkört
AT+MODE=”1″ áramkör válasza OK 1-kliens mód, 2-accespoint mód, 3-kevert mód
AT+GMR áramkör a firmware verzióval válaszol majd OK
AT+GSLP áramkör altatása, áramkör módosítása szükséges a működéshez, következő cikkben kitérek rá
AT+CWJAP=ssid,jelszó válasz OK vagy hibakód -kapcsolódás egy WIFI-hez
AT+CWQAP- lekapcsolódás a WIFI-ről
AT+CWSAP=ssid,jelszó,(0-64)csatorna,(0,2,3,4)kódolás válasz OK vagy ERROR -accespointként viselkedés. (IP.:192.168.0.4 gyárilag)
AT+CHIPMUX=1 válasz OK-0 egy kapcsolat, 1 -több kapcsolat
AT+CIPSERVER=1,80 válasz OK szerver indítása a 80 porton
AT+CIPSERVER=0,80 válasz OK szerver kikapcsolása a 80 porton
AT+CIPSEND=kliens ID(0-4),üzenet hossza (1-2048 max byte) válasz ERROR kapcsolati hiba esetén SEND OK sikeres küldés esetén SEND FAIL ha nem sikerült minden adatot átvinni.Magát az üzenetet csak ezután kell elküldeni, a válaszok az üzenet elküldése után jönnek.
AT+CIPCLOSE=0 válasz OK üzenet küldés vége
A fenti parancsok a teljesség igénye nélkül vannak felsorolva, némelyik elavult, de még benne van a firmware-ben.
Legtöbb hiba a monitorok esetében, a tápegységben található kondenzátorok kiszáradásából adódik. Az okokat most nem firtatom, lényeg, hogy a kondenzátorok cseréjével javítható. Rakjunk azonos kapacitásút de egy-el nagyobb feszültség tűréshatárral rendelkezőt. pl.: ha volt benne 1000uF 16V akkor kerüljön bele 1000uF 25V. Tovább bírja az esetek nagy részénél, mivel elég határesetre vannak kiszámolva.
Ez szép és jó de vannak olyan esetek, ahol csere után sem működik a monitor, be sem kapcsol holott a tápegység feszültségek megvannak. Ez általában 5V a vezérlésnek és 15-30V között a háttérvilágításnak a feszültsége, típustól függően. Háttérvilágítás hibákat itt nem tárgyalom.
Ebben az esetben, ha a vezérlőpanelon megvan a 3,3V meg az 1,7V (típus függő, esetek 99% -ban nincs gond vele) ami stabilizátorokkal áll elő az 5V-ból, akkor a monitorunk elfelejtette a programját. Igen ez is egy számítógép. Általában található egy controller (proci) a vezérlőpanel közepén, mellette egy 8 lábú flashrom ezt tartalmazza a programot. DVI-VGA csatlakozók közelében is találhatóak típustól függően 8 lábú eepromok de ezek a felbontást tartalmazzák. (ez mondja meg a PC-nek milyen felbontást tud a monitor)
Visszatérve a 8 lábú flashromra (90% ban nyolc lábú, van hogy több de az is flashrom) jellemző hogy 25-el kezdődik a számozásuk, ez tartalmazza a bootloadert, a monitor programját, jegyzi meg a felhasználó beállításait.
Ha a monitor nem indul ez a program sérült, nagy százalékban csak a program. Elég újraégetni az ebben található programot és működik a készülék. Sokszor evvel a hibával akkor találkoztam ha kapott valami egyenetlen tápellátást a monitor, pl.: kontakthibás dugalj a falban, „kiszáradt tápegység”.
Lényeg, hogy ki kell forrasztani a flashromot, szerezni egy eredeti programot egy ugyan olyan típusú monitorból, és beégetni majd visszaforrasztani a vezérlőpanelra a flashromot.
Ehhez a művelethez szükség lesz egy égető áramkörre, aminek két típusát fogom ismertetni itt. Mindkettőt használtam és működnek, nem én terveztem egyiket sem. Linkelni fogok minden hozzávalót, szoftvert. Valamint közzéteszem néhány monitor programját, hogy javítani tudjátok ezeket a típusokat. (az évek során gyűjtöttem össze, vagy kiolvastam, vagy a netről)
Első körben egy LPT-portra csatlakoztatható epromégetőt és programját ismertetem, évekig használtam, hátránya, hogy elavult szoftvere van, csak 32 bites operációs rendszeren működik. Ebben Hirens boot cd mindig segített. 😀 (vagy valami live oprendszert tartalmazó bootolható eszköz) A program shareware, a lincenszfájl még meg van, így fel fogom tenni azt is.
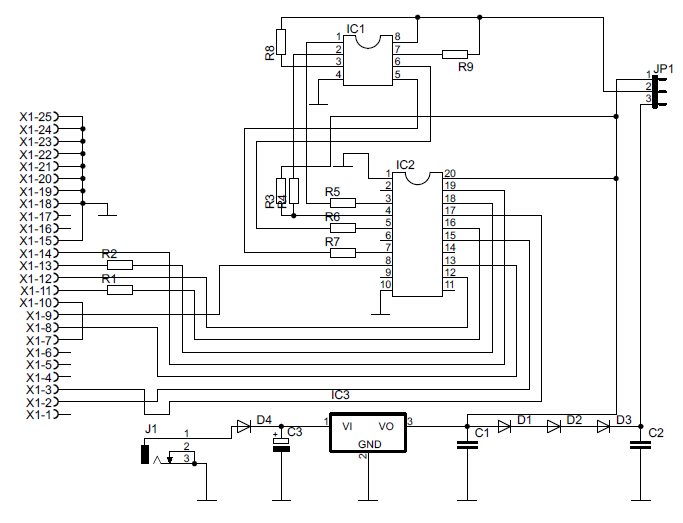
LPT port flashrom égető (tehnikservice.net):
Epromégető LPT
Lpt portos flash égető szoftvere letölthető itt. Mellékelve LG L1742S, LG L1910, LG L1942, LG W2234S, LG L2520 epromtartalma
A csomag a driver-t (tudjátok vezetők hajcsárok :D) is tartalmazza, win 10-nél ki kell kapcsolni a driver aláírás ellenőrzést hogy telepíteni lehessen. Ellenőrizve NOD-al nem vírusos mint egyes oldalakon.
Megosztás:
Ez a weboldal sütiket használ. Az Uniós törvények értelmében kérem, engedélyezze a sütik használatát, vagy zárja be az oldalt. További információ
Az Uniós törvények értelmében fel kell hívnunk a figyelmét arra, hogy ez a weboldal ún. "cookie"-kat vagy "sütiket" használ. A sütik kicsik, teljesen veszélytelen fájlok, amelyeket a weboldal azért helyez el az Ön számítógépén, hogy minél egyszerűbbé tegye Ön számára a böngészést. A sütiket letilthatja a böngészője beállításaiban. Amennyiben ezt nem teszi meg, illetve ha az "Elfogadom" feliratú gombra kattint, azzal elfogadja a sütik használatát.