Mint korábban írtam, ezek a modulok extra érzékenyek a stabil 3,3V-s tápra, nagyon nem szeretik a táp fluktuációját, és ilyenkor hajlandóak elfelejteni a programjuk egy részét vagy egészét. Ha megmarad bennük a bootloader, feléleszthetjük őket soros porton történő firmware feltöltéssel. Bootloader meglétét általában az bizonyítja, hogy a kék led villan 1-szer amint bekapcsoljuk a modult. (Ha nem villan a led, lehet próbálkozni flashrom égetéssel)
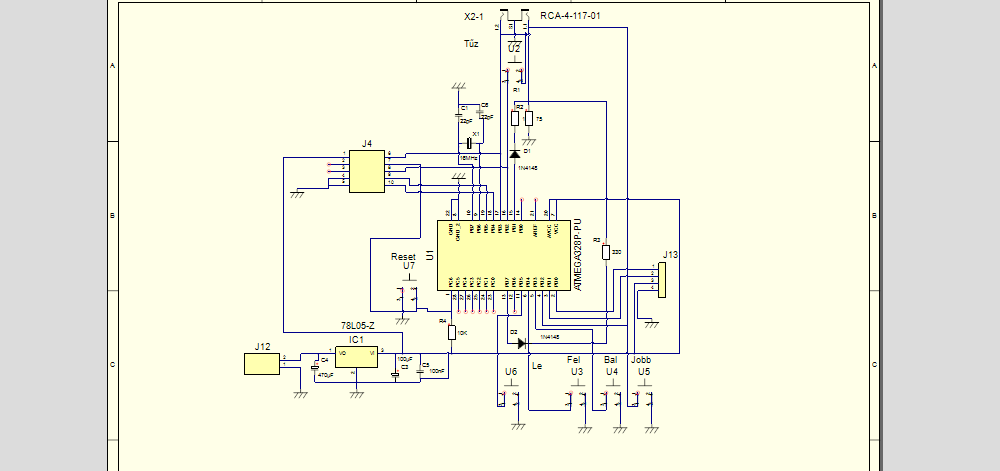
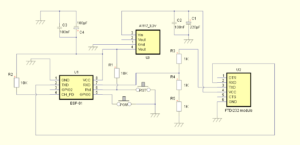
Program feltöltéshez kelleni fog a korábban publikálásra került áramkör, ugyanezzel az áramkörrel Arduinoval is tudunk feltölteni programokat a modulba:

Szükséges, az eredeti firmware ami letölthető itt:
https://www.electrodragon.com/w/File:At_firmware_bin1.54.zip
Valamint a gyártó feltöltő programja:
esp01 firmware letöltő program
Program feltöltés menete:
Meg keressük a számítógépen hogy melyik soros portra installálódott az FT232 modulunk. Esetemben Com3. (Vezérlőpult ->Eszközkezelő ->Portok)
A programban alkalmazzuk a következő beállításokat:

Programban ráklikkelünk a START gombra.
Programozó áramkörünkön megnyomjuk a PGM gombot lenyomva tartjuk és megnyomjuk a RST gombot majd először az RST-t utánna a PGM-et felengedjük. (ezzel állítottuk a bootloadert program módba)
A firmware feltöltését a kék csík jelzi az ablak alján, és a program kiírja hogy végzett.
RST gomb megnyomása után egy PUTTY vagy egyéb terminál konzollal ellenőrizhetjük a működést.(előző cikkben leírtam)
pl.: AT parancsra OK -val válaszol a modul.
Jó feltámasztást! 😀
Az én verzióm: